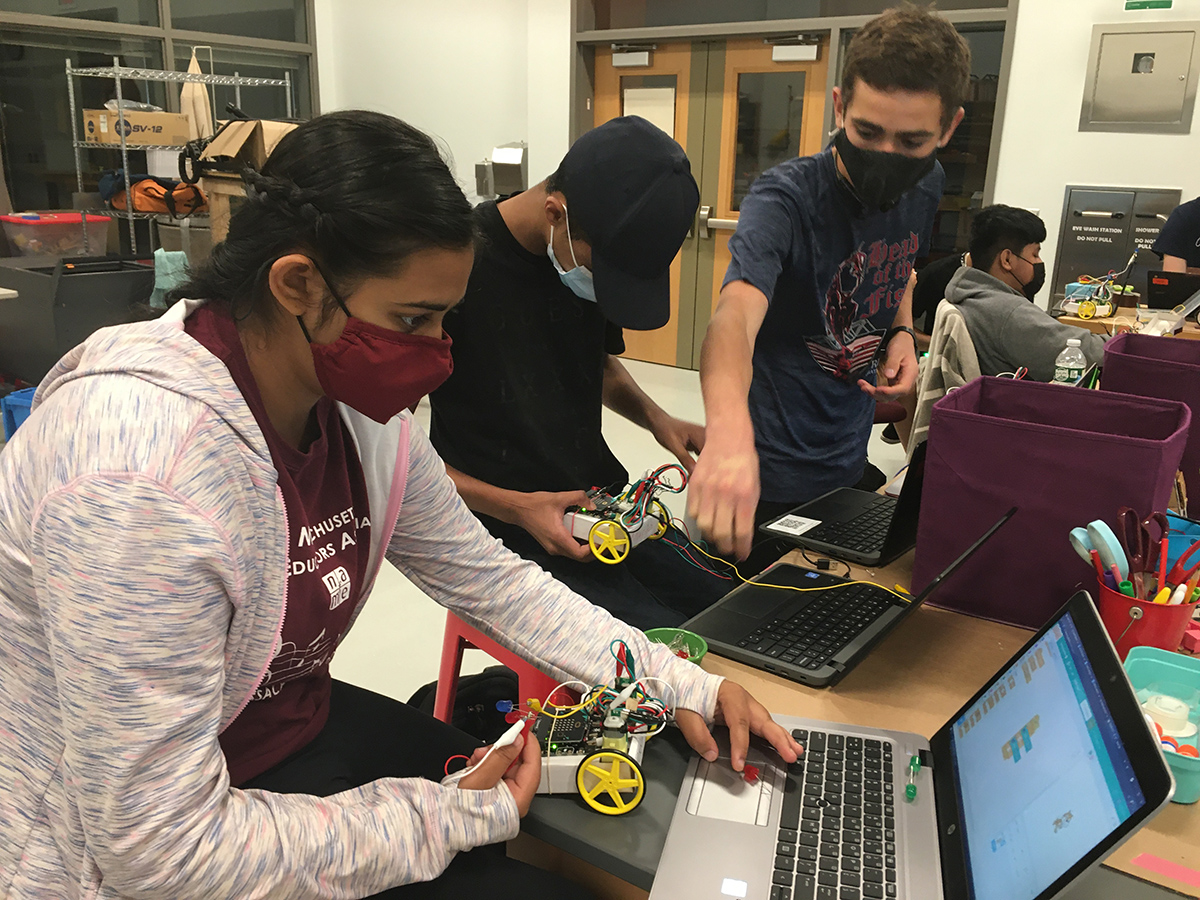
Sixteen Somerville High School (SHS) students from diverse backgrounds came together to explore the combination of art, storytelling, artificial intelligence (A.I.), and robotics. Their teachers worked with Lesley STEAM to weave this content together with relevant STEAM and CTE standards and learning objectives. The final product was a hybrid course that took place in the High School’s new FabLab, as well as online with Lesley University’s College of Art and Design faculty, a comic and graphic novel artist. They earned four Lesley college credits that were matched by 2.5 math and 2.5 art credits from SHS. Many of the skills they learned can be applied to other classes they can take during the school year such as math, language arts, art, and computer science.
Inspired by developments in artificial intelligence such as machine learning and A.I. sensing, the SHS/LSTEAM team facilitated several activities such as learning Scratch programming language, building basic robots, then students gained fine arts and storytelling skills from drawing comics. Class activities culminated in a capstone “artbot” project. The main objectives of the class were for students to:
- Show their understanding of storytelling by animating a character using craft material & servos.
- Demonstrate knowledge of robotics by building robots that alter the environment through art.
- Show their understanding of the iterative design process by rebuilding/repurposing their robot for new ends.
Students began the class by learning about artists who explore human-machine collaboration and interaction such as Soughwen Chung and Stephanie Dinkins. They learned about Joy Buolamwini, a coder who uses art and research to illuminate the social implications of artificial intelligence.

During the first two weeks, students learned how to use design thinking based on a culturally relevant making model from LSTEAM staff. The model included “design cyphers”, concept mapping, and “collaborative peer reviews.” They learned about the fundamentals of computer programming with Scratch, as well as how to build and program robots to imitate human creative expression. Later, they used an A.I. sensing extension in Scratch to enable their robots to respond and react to human movement.
During the third week, students worked with their peers, teachers and LSTEAM staff to synthesize what they learned in art and storytelling with their A.I. robot builds. In the morning, they took “Comics and the Graphic Novel” online with Barrington Edwards, summer faculty from Lesley University’s College of Art and Design; and in the afternoon, they met at the FabLab to engage in tasks that allowed them to combine clearly and coherently different ideas from visual storytelling with their physical robot prototypes. These activities culminated in student presentations synthesizing their work at the end of Friday class.

For the last and final week, students worked independently on their capstone projects, with support from the SHS/LSTEAM team. Students participated in collaborative peer reviews and gallery walks to get feedback from their peers, school teachers and administrators, and outside experts. On the last day each individual student or small group of students presented their final projects to the general school community.
Making the Artbots
For this class, students were tasked with designing, programming, and prototyping, and presenting their artbots, which are robots that respond to people and make art. They created a short comic about how to make an artbot and presented them during class. To build the artbot students were given design constraints such as:
- Your artbot can move freely or be attached to an object or a person
- Your artbot must generate or help users to make art
- Your artbot must convey a story or a message (ex. through gesture)
- You are encouraged to use pose detection / pose estimation
- You are encouraged to use sensors or other peripherals in your robot design
- You must design and fabricate your own chassis that can include single or multiple motors/servos, wheels, or other moving parts
Pose estimation is a computer vision technique that predicts and tracks the location of a person or object. This is done by looking at a combination of the pose and the orientation of a given person or object. Students learned how to add code modules and extensions to Scratch that detect human movement using the computer’s in-board (web) camera. This builds on the Face Sensing block that uses machine learning that is trained to see faces.
Examples of the students’ final ‘artbots’ include “Cube”, a robot that is controlled by two mini-computers called BBC Micro:bits; “The Crab” that moves left, right, forward, and backward using servos motors; a “Boatman Painter” bot that actually paints; a “Kraken” bot that draws; a “Ladybug” bot that realizes how beautiful the sunshine is and draws sun symbols on paper; and a Butterfly bot that collaborates with humans to draw colorful pictures. Two students created a skateboarding “Ninja Turtle” that used music as the art form to define its movement. And finally, one student created their version of the “Scratch cat” as a motion-sensing A.I. robot that uses peoples’ body movements to draw.
To learn more, check out the students’ final artbots:
This course was made possible through the support of BiogenSTAR, Somerville High School, Lesley University College of Art and Design, and the City of Somerville.
 rst grade students explored color mixing in art class by creating their own stop motion animation videos. The stop motion center was just one of six centers set up by K-Lo art teacher Amanda Kilton. The other centers included an overhead projector color transparencies, stamp mixing, tissue paper collage, painting and a color-based book browsing table with titles like “Monsters Love Colors.”
rst grade students explored color mixing in art class by creating their own stop motion animation videos. The stop motion center was just one of six centers set up by K-Lo art teacher Amanda Kilton. The other centers included an overhead projector color transparencies, stamp mixing, tissue paper collage, painting and a color-based book browsing table with titles like “Monsters Love Colors.”